Ярослав555
-
Число публикаций
6 -
Регистрация
-
Последнее посещение
Тип контента
Профили
Форумы
События
Библиотека
Интернет-журнал
Статьи
Весь контент пользователя Ярослав555
-
Измеритель потока. Проблема калибровки.
Ярослав555 ответил на тема форума автора Ярослав555 в Измерения
В общем, сел за листочек с векторами, и все с датчиком решилось через квадрат косинуса угла. Печаль в том, что при горизонтальной установке цена ошибки в 1 градус - 0.1%, а если под 45 ставить то +-1° дает уже 6% ошибки. И вот я с транспортиром и отвесом калибрую свои датчики. Вроде работает. -
Измеритель потока. Проблема калибровки.
Ярослав555 ответил на тема форума автора Ярослав555 в Измерения
Я о том, что в случае такого положения тензодатчика, подвешенный грузик будет слабо коррелировать с нагрузкой от потока. Смотрите еще раз по поводу переноса калибровок с одного прибора на другой. Получается я в сигнале получаю смещение на вес самой лопатки. Ну допустим, смещение нуля, откорректируем (если формула k*x+b, то в этом случае это b). Угол наклона тензодатчика влияет насколько он чувствителен, и тут внимание - чем более вертикально, тем более чувствителен к удару вещества об лопатку (внезапно ударный расходомер, реагируем на кинетическую энергию). Чем более горизонтально - тем больше он будет реагировать на вес (это уже другой типа расходомера). Куда прицепить центростремительную силу на скруглении в конце лопатки я вообще не представляю. И что получается? У меня имеется чувствительный элемент работающий на гибридном принципе, а калибровать/переносить калибровку я должен грузиками. Есть большое желание спрыгнуть с этой темы под предлогом, что точки калибровки я в программе предоставил (8 штук, думаю достаточно), ПИД регулятор работает, связь со скадой налажена... -
Измеритель потока. Проблема калибровки.
Ярослав555 ответил на тема форума автора Ярослав555 в Измерения
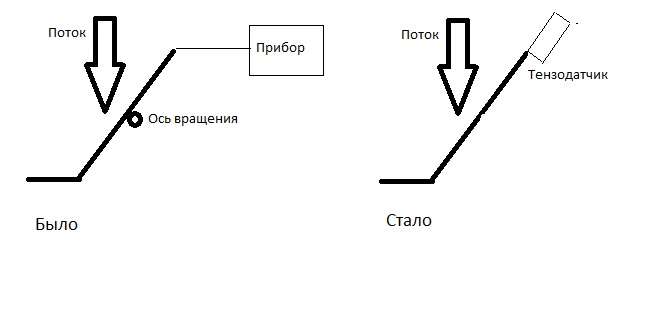
Сразу прошу прощения что не отвечал - на выходных у меня не было инета. Калиброванных расходомеров у меня нет - есть бункерные весы и софтина которая просчитывает сколько т/ч получилось на каждую порцию, точность та еще скажу я Вам. За последние пару дней я немного думал над этой проблемой. Далее о сути проблемы. Разберем еще раз оригинальную конструкцию - вещество падая сверху, скатывается по лопатке. При этом лопатка сидит на оси вращения. Я не механик, могу ошибаться, но мне кажется, что благодаря этой оси вращения лопатка не чувствительна к скорости падения вещества (кинетической энергии). С новой конструкцией, будучи на объекте, наблюдал как примерно одинаковый поток давал разные показания на моем приборе (в полтора раза) в зависимости от высоты падения вещества (перепад был около метра). Мне кажется это, во первых, не допустимо для средств измерения, пускай и таких примитивных, а во вторых делает невозможным перенос данных с одного расходомера на другой. А если учесть что углы установки тензодатчиков никто не проверял и не контролировал, то и подавно. -
Измеритель потока. Проблема калибровки.
Ярослав555 ответил на тема форума автора Ярослав555 в Измерения
Смотрите как я вижу ситуацию. Некий конструктор в свое время рассчитал эту лопатку - она есть преобразователь потока в линейную силу (мб в момент - присутствует ось вращения). Лет 7 назад, на своей первой работе, будучи слесарем КИПиА, мы калибровали подобное устройство в оригинале - там был крючок, на который вешались гирьки. Т-е лопатка преобразует поток в усилие по заданому закону, а прибор уже калибруется по образцовому усилию. Здесь же конструкторы начудили по полной. Тензодатчик стоит под углом. А он воспринимает только деформацию смещения, т-е только то усилие, которое направлено по перпендикуляру к продольной оси датчика. А усилие от подвешенной гирьки направлено вертикально вниз. Как по мне - нарушен принцип измерения этой лопаткой. По поводу термеха. Это было давно, и в рамках моей специализации очень поверхностно. У нас тут целый конструкторский отдел - пускай считают, они же начудили. Мне бы методичку какую по калибровке таких советских весов потока. -
Доброго времени суток уважаемые форумчане. Сразу опишу ситуацию. В исходнике имеем завод (мельница), на котором присутствует около 30 измерителей-регуляторов потока сыпучего вещества производства СССР. Устроены они как лопатка на вращающейся оси, которая своим рычагом давит в пневмо-прибор. Значит решили они сделать модернизацию. Конструктора выбросили механику-пневматику, лопатку прикрутили к тензодатчику, ось вращения лопатки выбросили, тензодатчик установили под углом 45 (условно) градусов. И теперь, на меня программиста легла ноша калибровки сего чуда. 4 прибора я откалибровал по бункерным весами. Остальные имеющиеся 20 не имеют потока через эти весы, поэтому так откалибровать нельзя. Может кто-то поймет о каком советском расходомере идет речь. Буду благодарен за наводку на руководство прибора, чтобы посмотреть методику настройки-калибровки как она была в оригинале. Нарисовал картинку-схему до и после.